Research
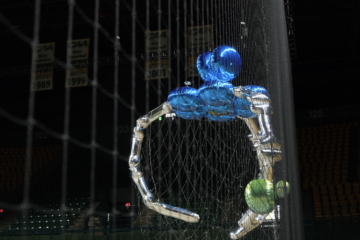
Recent Advancement of IndoorLight-Than-Air Agents Workshop at AIM2024
The goal for “Recent Advancement of IndoorLight-Than-Air Agents Workshop”, organized by Dr. Ningshi Yao, Dr. Fumin Zhang and Dr. Donald Sofge, is to disseminate the latest breakthroughs in Light-Than-Air (LTA) agents, i.e., robotic blimps, within the dynamic context of advanced intelligent mechatronics. This workshop is motivated by significant recent advances Read more…