This research project would develop transformative control techniques to co-design scheduling and control strategies for complex cyber physical human systems (CPHSs) with coupled shared resources, which can be implemented in real-time… read more
Allocate charging stations to EVs
Scheduling self-driving vehicles at traffic intersections
This project aims to build robotic agents that can robustly operate in dynamic and contested environments using sensor-actuator pairs that are distributed in the system. We are also participating in the Defend The Republic robotic blimp competition, which is a Navy sponsored aerial soccer-game type competition. The last competition was hosted at Eagle Bank Arena on April 24-28, 2023 and was featured on Fox 5 and NBC 4 News…read more
Sponsor: National Institute of Biomedical Imaging and Bioengineering (NIBIB), National Institutes of Health (NIH)
Engineering tools from imaging to computational models have been developed and utilized to advance our understanding of the eye biomechanics. In particular, physical systems that mimic human eyes have unique characteristics to obtain new knowledge on coordinated eye movement. In this project, we aim to develop novel artificial muscle-driven robotic eyes that are able to realistically mimic binocular eye movement, to better study human eyes...read more
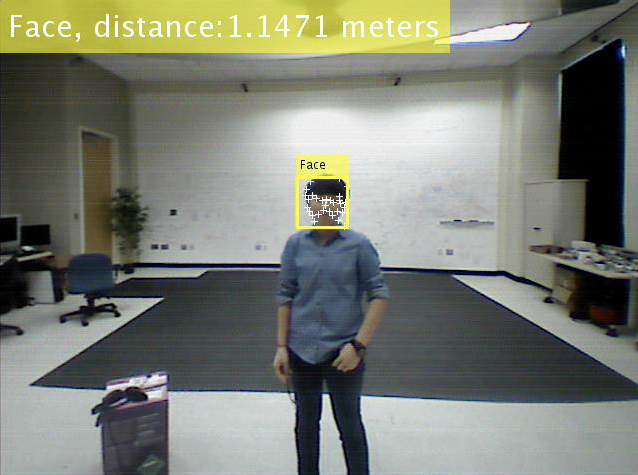
In this project, we presented an approach that allows the robotic blimp to detect and follow a human. This accomplishment is the first Human Robot Interaction (HRI) demonstration between an uninstrumented human and a robotic blimp…read more